2019年9月10日 第3回:d-q座標数式モデルの導出
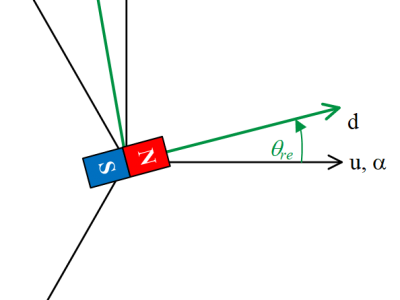
図3.1に三相静止座標系とd-q座標系の関係を示します。ここでは、d 軸を永久磁石磁束の方向と一致させ、d軸より90度進んだ軸をq軸と定義します。 図3.1 永久磁石同期電動機の等価回路 三相静止座 (さらに&hell[…続きを読む]
![]()
テクニカルコラムCOLUMN
図3.1に三相静止座標系とd-q座標系の関係を示します。ここでは、d 軸を永久磁石磁束の方向と一致させ、d軸より90度進んだ軸をq軸と定義します。 図3.1 永久磁石同期電動機の等価回路 三相静止座 (さらに&hell[…続きを読む]
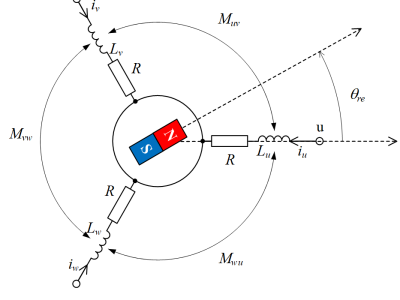
図2.1に永久磁石同期電動機の等価回路を示します。ここで、u,v,w相の各巻線の電気磁気的特性は同一であり、電流、磁束の高調波成分は無視できると仮定します。また、磁気回路の飽和特性などの非線形特性や (さらに&hell[…続きを読む]
はじめに ベクトル制御は1970年前後、誘導モータのトルク伝達関数を定式化し、 直流モータと同様なトルク制御を実現することを目的としてドイツで誕生しました。 その後、パワーエレクトロニクス、マイクロプ (さらに&hell[…続きを読む]
モーターのことでお困りのことがあったらお気軽にお問い合わせください。