2020年7月17日 補足4:ワインドアップ現象時とアンチワインドアップ制御時のPI制御器出力の違いについて
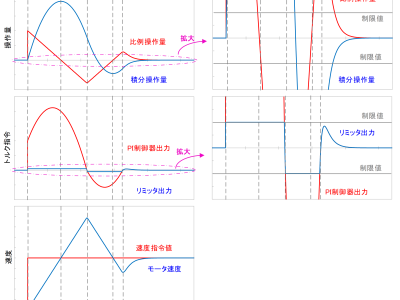
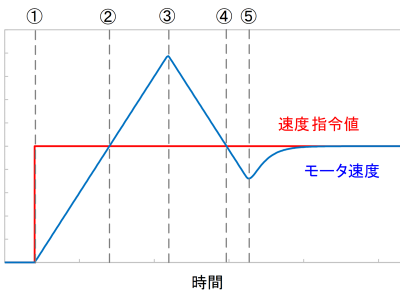
ワインドアップ現象時の操作量 図1にワインドアップ現象時の操作量を示します。①から②の区間では、モータ速度が指令値よりも小さいため速度偏差は正の値となります。ステップ指令を与えた瞬間に速度偏差に応じ (さらに&hell[…続きを読む]
![]()
テクニカルコラムCOLUMN
ワインドアップ現象時の操作量 図1にワインドアップ現象時の操作量を示します。①から②の区間では、モータ速度が指令値よりも小さいため速度偏差は正の値となります。ステップ指令を与えた瞬間に速度偏差に応じ (さらに&hell[…続きを読む]
リミッタを含むシステムのステップ応答 ブロック図 図9.1にリミッタを含むシステムを示します。「第6回:ベクトル制御のブロック図とPI制御器を用いた電流制御系の設計」の図6.1に示したような速度制御 (さらに&hell[…続きを読む]
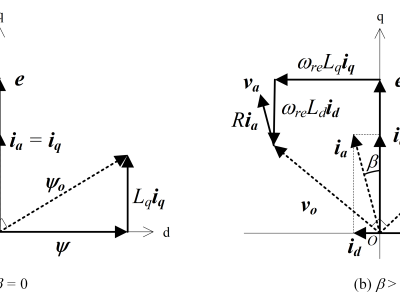
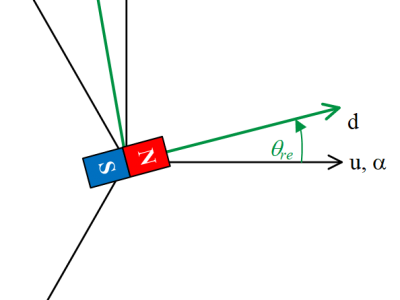
電流位相を変化させたときのベクトル図 「第7回:トルクを効率よく出力するための電流ベクトル選択方法」では、電流位相を変化させることで効率よくトルクを出力できることを示しました。ここでは、まず、電流位 (さらに&hell[…続きを読む]
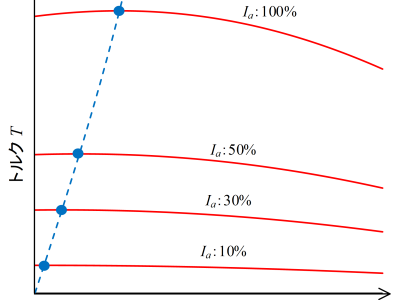
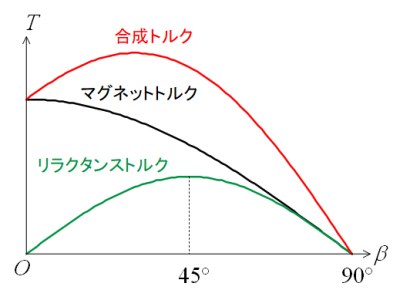
最大トルク/電流制御 「第4回:永久磁石同期電動機の電力とトルク」の図4.1に示した通り、トルクはマグネットトルクとリラクタンストルクの和で得られます。また、図4.1より、電流位相角が0度から90度 (さらに&hell[…続きを読む]
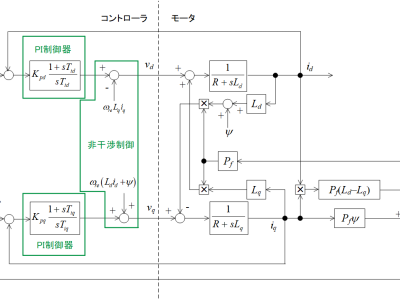
ベクトル制御のブロック線図 図6.1にPI制御器を用いたベクトル制御のブロック線図を示します。「クラウドモーターシミュレーター β版」には図6.1に示すブロック線図を実装しています。 図6.1 永久 (さらに&hell[…続きを読む]
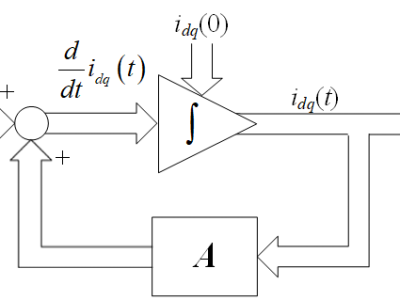
「第5回:永久磁石同期電動機のブロック線図と非干渉制御」に示した「図5.1 永久磁石同期電動機のブロック線図」を理解するためには、状態方程式と伝達関数の関係を知っておく必要があります。ここでは、状態 (さらに&hell[…続きを読む]
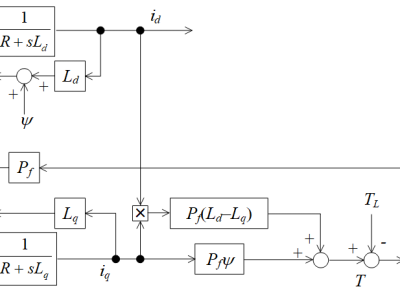
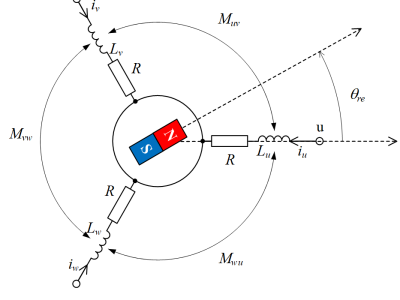
ブロック線図 図5.1に永久磁石同期電動機のブロック線図を示します。伝達関数は、状態方程式をラプラス変換することによって導出することができます。また、電流からトルクは「第4回:永久磁石同期電動機の電 (さらに&hell[…続きを読む]
永久磁石同期電動機の入力電力と出力トルクの関係について考えます。永久磁石同期電動機の入力電力は電圧と電流の内積によって得られ、以下の式となります。ただし、ここでは座標変換を絶対変換とします(相対変換 (さらに&hell[…続きを読む]
回転座標変換を行う上で、微分の計算には十分な注意が必要です。インダクタンスと電流と微分演算子が含まれる項に変換行列をかけたときの計算方法を間違えてしまうと、正しいモータモデルを得ることができません。 (さらに&hell[…続きを読む]
絶対変換と相対変換の変換前後の関係について以下の表に示します。特に注意が必要なのは鎖交磁束の取り扱いです。d-q座標で制御を行う際にモータパラメータが必要となりますが、制御で絶対変換を用いているのか (さらに&hell[…続きを読む]
モーターのことでお困りのことがあったらお気軽にお問い合わせください。